
Sistemas Corporales Segmentarios
Publicado 2 de abril de 2013, 13:52
Dentro del principio de la complejidad, la biomecánica ha desarrollado varios sistemas finitos que permiten agrupar totalmente los segmentos corporales con el fin de definir cada uno de los sistemas empleados. Hoy en día, se reconocen cuatro tipos de sistemas corporales totales segmentarios que involucra todo el cuerpo humano: SC-14, SC-15, SC-16 y el SC-18 en Acero J. (2002). Esto no implica que desde la investigación científica en Biomecánica, no se hayan desarrollado algunos sistemas o modelos regionales por ejemplo dedicados al estudio exclusivo del pie, la mano, la columna vertebral, tronco, el miembro superior, el miembro inferior y los complejos de cabeza-nuca, pelvis, rodilla, muñeca y tobillo. Presentamos aquí de una forma sencilla pero explicativa los sistemas antes mencionados.
SC-14
Es un sistema ampliamente utilizado y avalado por la sociedad Internacional de Biomecánica (ISB) fue creado por Dempster, (1955) en sus estudios de distribución de la masa corporal y sus porcentajes de contribución. Consiste en dividir al cuerpo humano en 14 segmentos corporales para un mejor estudio del mismo. En la figura 1 se establecen los 14 segmentos y sus localizaciones
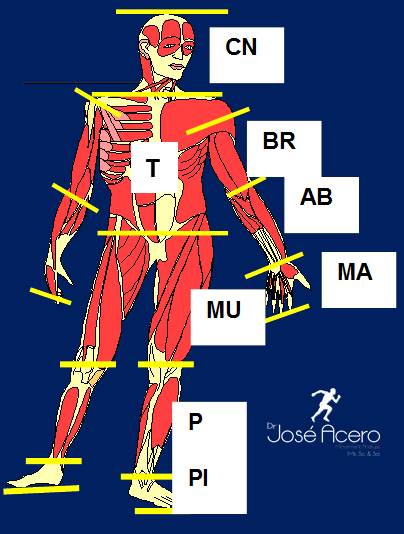
Figura 1. Sistema Internacional más utilizado SC-14 (ISB) (Dempster,1955)
1. Cabeza Nuca (CN)
2. Tronco (T)
3 y 4. Brazo x 2 (BR)
5 y 6. Antebrazo x 2 (AB)
7 y 8. Mano x 2 (MA)
9 y 10. Muslo x 2 (MU)
11 y 12 Pierna x 2 (P)
13 y 14 Pie x 2 (PI)
Este sistema es muy útil cuando se estudia la cinemática de todo el cuerpo humano y se establece la coordinación entre los 14 segmentos o los que se requieran. También, se utiliza para el cálculo cinético de los centros de masas segmentales y el total integrado
SC-15
Este modelo fue propuesto por Hanavan (1964) y fue hecho con base a 15 sólidos geométricos. Los troncos superior e inferior son considerados como cilindros con bases elípticas, la cabeza-nuca como elipsoides rotacionales, las manos como esferas, y los brazos antebrazos, muslos piernas y pies como conos truncados. Ver figura 2
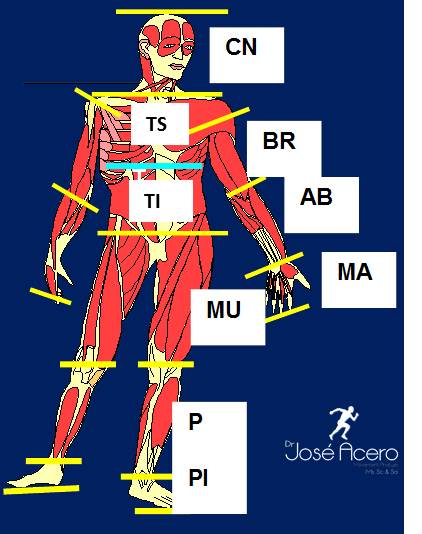
Figura 2. Sistema SC-15 (Hanavan 1964)
1. Cabeza Nuca (CN)
2. Tronco Superior (TS)
3. Tronco inferior (TI)
4 y 5. Brazo x 2 (BR)
6 y 7. Antebrazo x 2 (AB)
8 y 9. Mano x 2 (MA)
10 y 11. Muslo x 2 (MU)
12 y 13. Pierna x 2 (P)
14 y 15. Pie x 2 (PI)
Este sistema es muy útil para estudiar la cinemática de todo el cuerpo humano y su coordinación segmental. También, se utiliza para el cálculo cinético de los momentos de inercia, centros de masas segméntales y centros de masas integrados.
SC-16
Es un sistema elaborado por el Dr. Zatsiorsky et al 1990 y se refiere a que el cuerpo es dividido para los estudios biomecánicos en 16 segmentos. El estudio original fue hecho con seres vivos a través de la tecnología de la fotogrametría. Contiene los segmentos del SC-14 pero en este caso el tronco (T) por las diferencias entre las densidades corporales y su movilidad es dividido en tres troncos: superior, medio e inferior. Ver figura 3
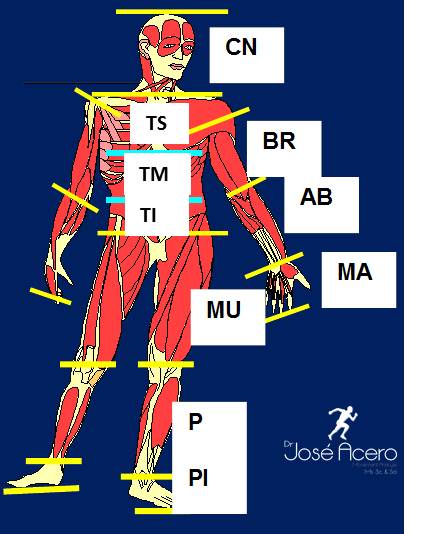
Figura 3. Sistema SC-16 (Zatsiorsky et al 1990)
1. Cabeza Nuca (CN)
2. Tronco Superior (TS)
3. Tronco medio (TM)
4. Tronco inferior (TI)
5 y 6. Brazo x 2 (BR)
7 y 8. Antebrazo x 2 (AB)
9 y 10. Mano x 2 (MA)
11 y 12. Muslo x 2 (MU)
13 y 14. Pierna x 2 (P)
15 y 16. Pie x 2 (PI)
Este sistema es muy útil en los estudios cinemáticos donde los 16 segmentos o un grupo de ellos interactúen. Bajo este método, se calculan cada una de las 16 masas segmentales, densidades segmentales y los puntos de inercia tan importantes para los estudios de la cinética del movimiento humano
SC-18
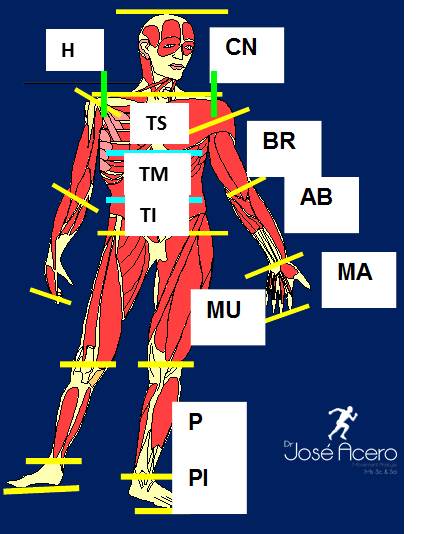
Figura 4. Sistema SC-18 (el Dr. Hatze, 1980)
1. Cabeza Nuca (CN)
2. Tronco Superior (TS)
3. Tronco medio (TM)
4. Tronco inferior (TI)
5 y 6. Brazo x 2 (BR)
7 y 8. Antebrazo x 2 (AB)
9 y 10. Mano x 2 (MA)
11 y 12. Muslo x 2 (MU)
13 y 14. Pierna x 2 (P)
15 y 16. Pie x 2 (PI)
17 y 18. Hombro x2 (H)
Este sistema es muy útil en los estudios cinemáticos y de los modelos inerciales computacionales donde los 18 segmentos o un grupo de ellos interactúen pero sobre todo cuando las acciones son muy particulares del tren superior del cuerpo humano. Estos 18 segmentos son asumidos como una serie de sólidos geométricos que pueden ser calculados con medios informáticos
Referencias Bibliográficas
Acero J. (2002) Bases Biomecánicas para la actividad física y Deportiva. Faid Ed. Pgs. 199 2ª Ed. Universidad De Pamplona. ISBN 98-958-97105-2-2
Dempster W. (1955) Space requirements for the seated operator. Wade technical report 55159. Wrigth-Petterson Air force base, Ohio
Hanavan E. (1964.) A mathematical model of the human body. Technical Report 64-102, Wright-Patterson Air Force Base.
Hatze, H. (1980). A mathematical model for the computational determination of parameter values of
Anthropometric segments. Journal of Biomechanics, 13, 833-843.
Zatsiorsky V, Seluyanov V, Chugunova L (1990). In vivo body segment inertial parameters determination using a gamma-scanner method. In N. Berme & A. Cappozzo (Eds.), Biomechanics of Human Movement: Applications in Rehabilitation, Sports and Ergonomics (pp. 186-202). Worthington, OH: Bertec Corp.
![]()