
Antropometría Biomecánica: Localización triplanar (3P) del centro de masas corporal total (CMT)
Publicado 25 de septiembre de 2013, 23:43
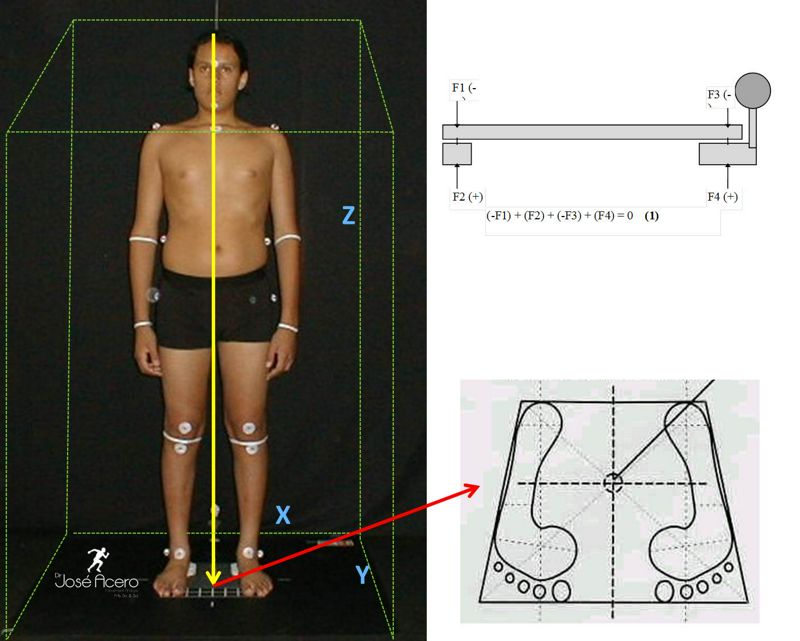
Figura 1. Concepción científica y práctica de la Localización triplanar (3P) del centro de masas corporal total (CMT)
La localización del centro de masas total (CMT) es un segundo set de variables que tiene gran importancia en los conceptos desarrollados en Antropometría biomecánica por Acero, 2002 y que están directamente relacionados con la cinética (Causas como fuerzas, Masas e Inercia) del movimiento humano. Dependiendo de la localización del CMT, el individuo tendrá mayor o menor ventajas mecánicas para ejecutar los movimientos requeridos. Por ejemplo, investigadores han comparado la altura del CMT en hombres y mujeres, han estimado el cambio de la altura relativa del CMT desde la infancia a la adultez, han identificado la línea de CMT en los planos frontal y sagital en la postura de pie, han estandarizado prototipos de deportistas y/o pacientes de acuerdo a la localización de las mencionadas líneas CMT dentro de los planos corpóreos
1.Concepto
El centro de masas total (CMT) es un punto teórico localizado en los tres planos (transversal, sagital y frontal) sobre la cual un objeto puede ser balanceado. Un objeto (como el cuerpo humano) se comporta como si todas la masas segmentales estuviesen concentradas sobre ese punto. Este es un punto teórico con enorme aplicabilidad en la dinámica del movimiento y que está localizado a una altura (Z) determinada desde los talones en el plano transversal a una distancia lateral derecha o izquierda (X) del eje axial de nuestro cuerpo en el plano frontal y finalmente este punto tiene un distancia anterior o posterior (Y) del eje axial de nuestro cuerpo. (Ver figura 2)
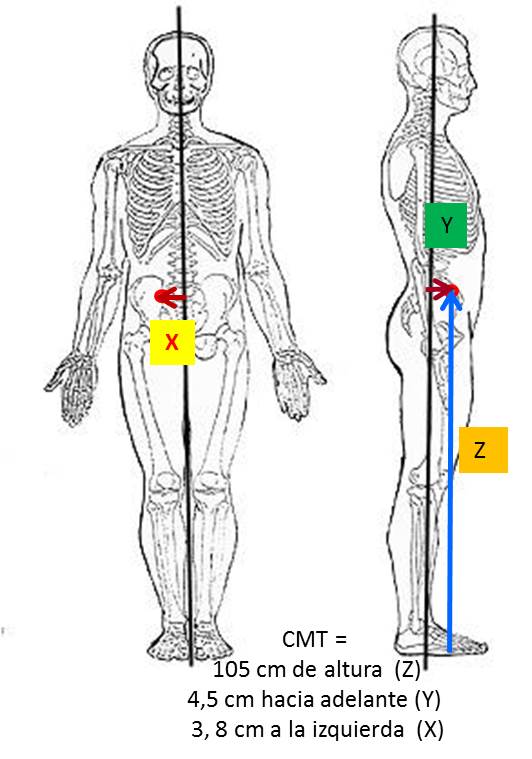
Figura 2. Ejemplo de la localización real de las líneas del centro de masas total (CMT) en los tres planos de movimiento
2. Fundamento científico
La habilidad de localizar CMT de un cuerpo está basada sobre la información que nosotros podamos extraer sobre un sistema en equilibrio. Su localización triplanar (3P) puede ser medida en forma relativamente estática utilizando el sistema diseñado y aplicado por el Dr. Acero y denominado Unidad de Plataformas Reactivas 3P (UPR-3P) que en forma científica y técnica localizan las líneas del centro de masa del cuerpo humano en sus tres planos: frontal, sagital y transversal. Este cálculo y proceso se fundamenta en los trabajos de Lovett y Reynolds, 1909. Luttgens & Wells,1982 y Widule 1994 y en dos leyes físicas del equilibrio donde la sumatoria de fuerzas y momentos un objeto son iguales a 0
Dos condiciones de equilibrio deben satisfacerse para que un sistema esté en equilibrio:
A. La fuerzas lineares que actúan en un sistema deben estar balanceadas (= 0). Una fuerza actuando en una dirección debe ser balanceada por otra fuerza actuando en dirección opuesta
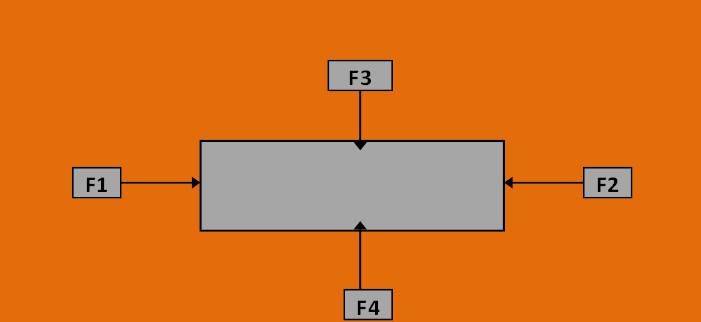
F1 = F2
F3 = F4
S Fx = 0 ( Componentes de fuerza horizontal )
S Fy = 0 ( Componentes de fuerza vertical )
B. Cualquier efecto de torque actuando en un sistema debe estar en balance (=0). Un torque (0 momento) es definido como una fuerza multiplicada por la distancia desde un punto en la cual el sistema rota. Una fuerza que tiende a rotar el sistema en una dirección debe ser balanceado por una fuerza que tiende a rotar el sistema en dirección opuesta.
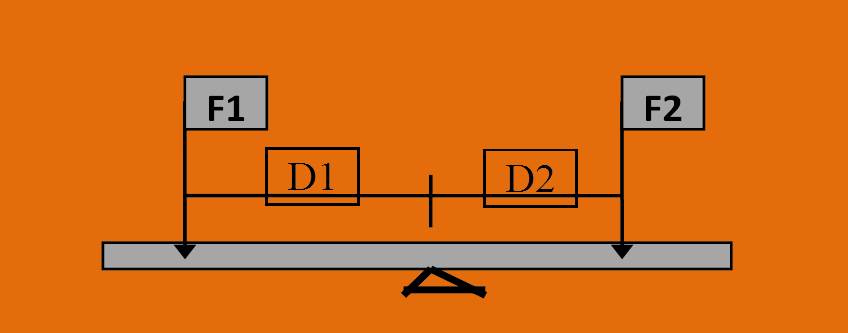
F1*D1 = F2*D2
F1*D1+ (-F2*D2) = 0
S = 0
Nota 1: En problemas relacionados con la determinación del CMT, es necesario identificar la dirección en la cual una fuerza está actuando y la localización de la línea de aplicación de la fuerza relativa al origen del sistema

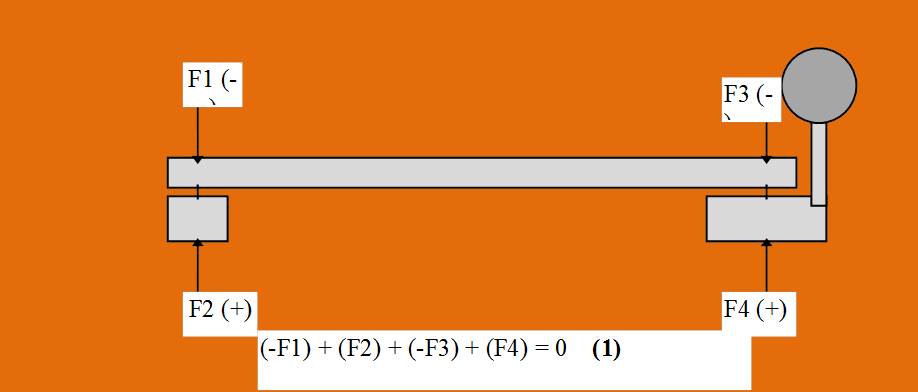
Primera condición de equilibrio: Las fuerzas son balanceadas por cuanto las fuerzas actuando hacia abajo (-) son contrarrestadas por las fuerzas actuando hacia arriba (+). La fuerza de la plataforma actuando hacia abajo es balanceada por la fuerza ejercida por el bloque y la balanza hacia arriba. Lo anterior puede ser verificado reemplazando el bloque por una segunda balanza. La suma de las lecturas de las dos balanzas debe ser igual al peso de la plataforma y si una persona se acuesta sobre la plataforma, entonces, la suma de las lecturas de las balanzas es igual a la suma del peso de la persona mas el de la plataforma.
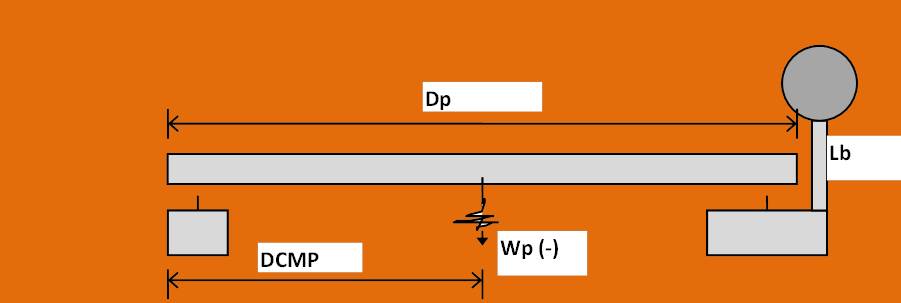
Segunda condición de equilibrio: La suma de los torques o momentos es igual a cero para estar en equilibrio. Podemos indicar que el extremo soportado por el bloque es considerado como el eje de rotación. La lectura de la balanza (Lb) multiplicada por la distancia a su eje de rotación (Dp) es un torque que se mueve en dirección contraria a lasmanecillas del reloj. El peso de la plataforma (Wp) multiplicada por la distancia del centro de masas de la plataforma (DCMP) concentrado en ese punto al eje de rotación es otro torque que va en dirección contraria.
Lb*Dp + (-Wp)*DCMP = 0 (2)
Nota 2: Todos los valores en ecuación (2) son conocidos excepto DCMP, por lo cual resolvemos la ecuación así:
DCMP = Lb*Dp/Wp (3)
De acuerdo a lo anterior se puede localizar la línea del centro de masas (CMT) de una persona eliminando el efecto de fuerza (-) de la plataforma simplemente colocando la balanza en cero cuando la plataforma descansa sola sobre la balanza y bloque.
1. La Innovación Tecnológica UPR-3P
El anterior desarrollo científico fue transferido a un sistema de plataformas de reacción denominado UPR-3P (Acero 2002 y 2011). Entonces la medición antropométrica de carácter biomecánica no se hace con medidas tradicionales o convencionales sino con tecnología cinética. Por consiguiente, dos diferentes tipos de plataforma fueron diseñados y construidas para tales fines. La primera llamada Plataforma Plano T que determina la localización exacta del centro de masas en el plano transversal (T). La segunda es una plataforma que establece la localización del centro de masas en los dos planos faltantes sagital y frontal (Plataforma biplanar SF). Ambas plataformas hacen lecturas digitales importantes para las ecuaciónes (2 y 3) basadas en la reacción de celdas de carga localizadas estratégicamente. Ver figura 3
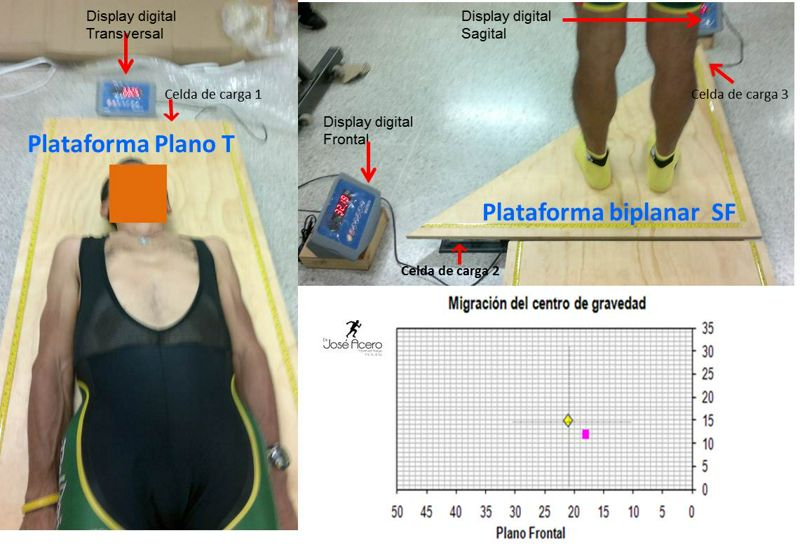
Figura 3. Distribución tecnológica y finalidad del sistema de plataformas reactivas UPR-3P creada por Acero en 2002 y optimizada en 2011
1.La aplicación
En el siguiente ejemplo de un deportista se presentan los datos obtenidos ( ver tabla 1, 2 y figura 2) así:

Tabla 1. Resultados de la Localización del centro de masas total (CMT) en el plano transversal

Tabla 2. Resultados de la Localización del centro de masas total (CMT) en los planos sagital y frontal
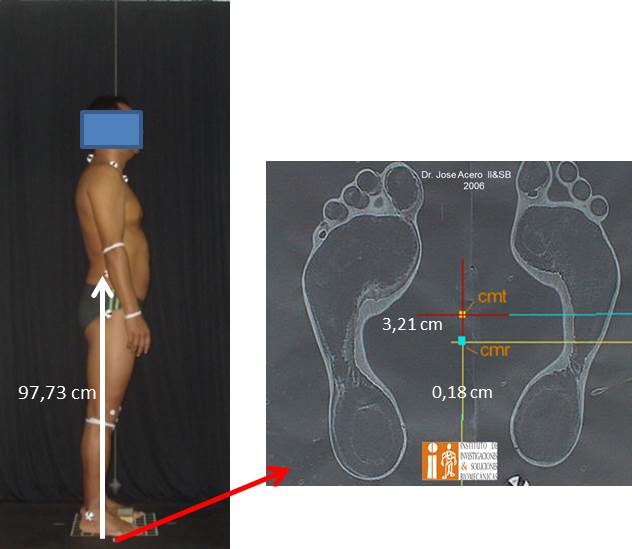
Figura 4. Resultados gráficos y numéricos del CMT en los tres planos para un deportista
1.Variables Biomecánicas Obtenidas
• Localización del Centro de Masa Total Corporal (CMTC) el plano Transversal (altura del CMTC)
• Relación Estatura/ miembros inferiores
• % de La altura del CMTC con respecto a la estatura corporal
• Área de la base de sustentación para la posición bipodal
• Localización del CMTC en el plano sagital ( Distancia PA ó Y)
• Localización del CMTC en el plano frontal ( Distancia DL ó X)
• Coordenadas de migración del CMTC en los planos frontal y sagital (Intersección XY)
• Elaboración del Centrograma
2.Estudios Derivados
• Localización del CMTC en forma triplanar (3P) para procesos de atrofia o hipertrofia muscular
• Localización del CMTC en forma triplanar (3P) para cada uno de los ciclos y macro-ciclos del entrenamiento deportivo
• Perfil de localización del CMTC para diferentes modalidades deportivas, funcionales y de trabajo
• Migración del CMTC (3P) en intervenciones de dieta y alimentación en caso de obesidad, fortalecimiento o ganancia de peso corporal
• Migración del CMTC (3P) para casos de trauma y patologías
3.Referencias bibliográficas
• Acero J. (2002) Bases Biomecánicas para la Actividad Física Deportiva. Universidad de Pamplona. Faid editores. ISBN 958-97105-2-2, Pamplona.
• Acero J. (2011) Digitalización del sistema de Plataformas UPR-39. Estudio técnico del Instituto de Investigaciones Y Soluciones Biomecánicas. Cali. Colombia
• Luttgens & Wells . Kinesiology: Scientific Basis of Human Movement. Saunders College Publishing, Philadelphia, USA 1982
• Widule, C. Biomechanical Foundations of Motor Skills. Learning Systems, West Lafayyette IN, USA. 1994
• Reynolds, e. y Lovett, r.w. (1909) A method of determining the position of the centre of gravity in its relation to certain bony landmarks in the erect position. American