
Grados de Libertad en el Movimiento Humano
Publicado 22 de abril de 2013, 16:00
La movilidad que tiene el cuerpo humano para cualquier tipo de actividad diaria, funcional, deportiva o en la actividad física tiene un factor fundamental que lo limita. El cuerpo humano es una unidad totalmente dinámica que se fracciona en una serie de componentes segmentales. Cada segmento está unido por una o más articulaciones que ayudan y también restringen su capacidad teórica total de movimiento. Este concepto se ha denominado la teoría de los grados de libertad (GDL) del movimiento
Los grados de libertad (GDL) de una articulación son definidos (Zatsiorsky, 1998 en Acero, 2005) como las coordenadas independientes requeridas para caracterizar completamente un cuerpo, sistema o posición. Un solo grado de libertad entonces, puede ser definido como la forma independiente en que un cuerpo se mueve ya sea en traslación o rotación. Un cuerpo suspendido en el aire tiene 6 grados de libertad máximos pues este puede trasladarse y rotar sobre tres ejes independientes (sagital, transversal (longitudinal) y frontal) o sea, dos movimientos por tres ejes igual seis GDL (Ver Figura 1)
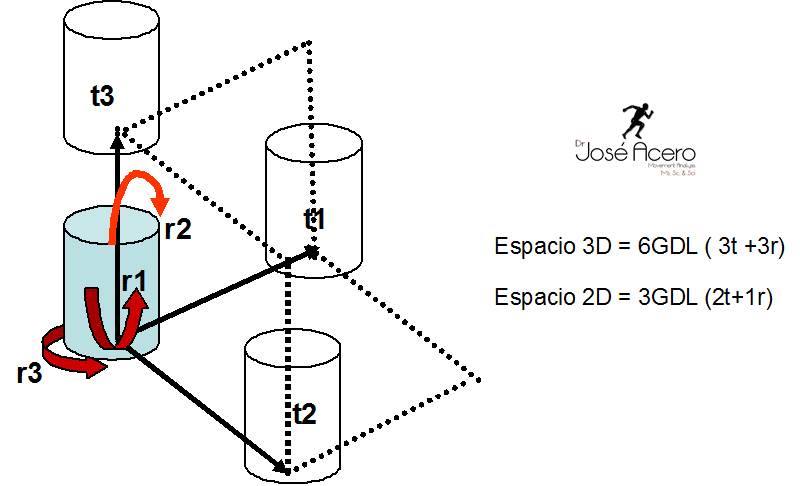
Figura 1. Esquema de grados de libertad (GDL) en un cuerpo suspendido
Según Acero (2002), las articulaciones diartrósicas (sinoviales) o móviles del cuerpo humano dependiendo de su tipo poseen mayor o menor número de GDL y son clasificadas teniendo 1, 2, o 3 GDL. El número máximo teórico de GDL por cada articulación es de 6 si estuviesen suspendidas en el espacio pero este no es el caso del cuerpo humano que esta interconectado. Si algunos de los movimientos traslacionales dentro de una articulación son asumidos como muy pequeños, entonces, 3 GDL del total de 6 son ignorados resultando que las articulaciones más móviles tendrían 3 GDL.
Las articulaciones planas (Inter-metacarpianas) y macho-hembra (Coxo-femoral o Gleno-humeral) tienen tres grados de libertad ·GDL (ver figuras 2 y 3).

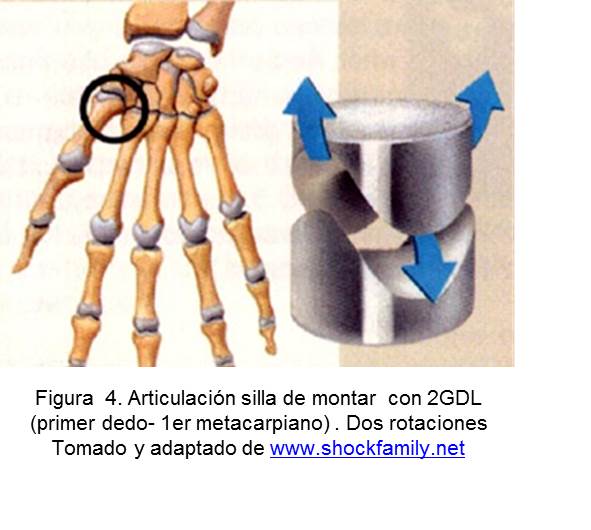
Las articulaciones de silla de montar y elipsoidales permiten movimientos rotacionales hacia atrás y hacia delante, arriba y hacia abajo pero no permite rotación transversal por consiguiente son del tipo 2 GDL (ver Figura 4)
Con un grado de libertad son llamadas mecánicamente en bisagra o gozne o pívot y permite la retracción o extensión de uno de los extremos (ver Figura 5).

Una manera de clasificar las articulaciones es con base en su función o cantidad de ejes que posee
Uni-axiales: Representan aquellas articulaciones donde el movimiento angular se realiza en un solo eje. Un ejemplo es la articulación del codo (humero-ulnar), la cual permite flexión y extensión alrededor de un eje frontal-horizontal o sea 1 GDL.
Bi-axiales: Permiten movimientos en dos ejes diferentes. Por ejemplo, la articulación a nivel de la muñeca (radio-carpiana) permite movimientos de extensión y flexión alrededor de un eje frontal-horizontal, y abducción y aducción alrededor de un eje sagital-frontal o sea 2GDL
Tri-axiales: En estos tipos de articulaciones, los movimientos se producen en tres ejes. El ejemplo clásico es la articulación del hombro y cadera permiten flexión y extensión alrededor de un eje frontal-horizontal, abducción y aducción alrededor de un eje sagital-frontal y rotación alrededor de un eje vertical o sea 3 GDL
No-axial: Éstas solo permiten pequeños movimientos de deslizamiento (movimiento no axial pero es traslacional). Por ejemplo, la articulación formada entre los huesos carpianos y tarsianos de la muñeca y tobillo respectivamente o sea 1 GDL
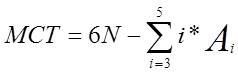
La movilidad total del cuerpo humano según lo reportado en Acero, 2002 basado en Zatsiorsky 1998, utiliza la fórmula levemente modificada de Gruebler así:
Dónde:
MCT = movilidad total corporal
N=El número total de huesos móviles
i = es la clase de articulación (i =6-f, donde f es el # de GDL reales de la articulación)
Ai = número de articulaciones de clase i
MCT = (6*148)- (3*29)-(4*33)-(5*85) = 888-87-132-425 = 244 GDL
En resumen, cada articulación contribuye según su conformación morfológica, estructural y funcional con un número determinado de grados de libertad que son 1,2 y 3 GDL pero también estas tienen restrictores o movimientos que no pueden físicamente hacerse. La capacidad total de movilidad del cuerpo es de 244 grados de libertad comparado con los 888 GDL posibles si el cuerpo humano no fuera articulado y cada segmento tuviese 6 GDL. Esta teoría es muy importante en los estudios cinemáticos del tipo de movimiento a realizar y sus cambios de planos, en el entendimiento de los procesos de rehabilitación al saber que cada articulación tiene sus rangos de movilidad propios y su limitantes, en la compresión del diseño de estudios cinéticos de las articulaciones actuantes tales como los momentos articulares y en el modelado biomecánico de los segmentos o grupos de ellos.
Referencias Bibliográficas
Acero J. 2002 Bases Biomecánicas para la actividad física y Deportiva. Faid Ed. Pgs. 199 2ª Ed. Universidad De Pamplona. ISBN 98-958-97105-2-2
Acero J. (2005) Análisis cualitativo y cuantitativo del movimiento deportivo. Texto Guía. Curso Internacional sobre Biomecánica Deportiva del Centro Olímpico de Alto Rendimiento en Ecuador. Comité Olímpico Ecuatoriano. Guayaquil, Ecuador
Zatsiorsky V. 1998, Kinematics of Human Movement. Human Kinetics
![]()