
Influencia de las Zapatillas para Correr sobre la Actividad Muscular
Influence of Running Shoes on Muscle Activity
Fabian Hoitz1,2, Jordyn Vienneau2 y Benno M. Nigg2
1Biomedical Engineering, Schulich School of Engineering, University of Calgary, Calgary, Alberta, Canada
2Human Performance Laboratory, Faculty of Kinesiology, University of Calgary, Calgary, Alberta, Canada
Artículo publicado en el journal Revista de Entrenamiento Deportivo, Volumen 1, Número 3 del año 2021.
Publicado 13 de enero de 2021
Resumen
Palabras clave: carrera, calzado, actividad muscular
Abstract
Keywords: running, footwear, muscle activity
INTRODUCCIÓN
En las últimas cuatro décadas, las discusiones científicas sobre la biomecánica y las lesiones al correr han estado dominadas por dos paradigmas: el paradigma de la “fuerza de impacto” y el paradigma de la “pronación” [1]. En resumen, estos paradigmas sugieren que mayores magnitudes de fuerzas de impacto y/o pronación que pueden ocurrir durante la carrera son dañinas para el cuerpo humano y pueden conducir al desarrollo de lesiones al correr. En consecuencia, los avances en el calzado para correr, las plantillas de calzado y las ortesis han tenido como objetivo reducir las fuerzas de impacto [2] y/o realinear la cinemática del tobillo [3]. Sin embargo, a pesar de la gran inversión financiera en el desarrollo de estos productos, las tasas de lesiones por correr se han mantenido relativamente sin cambios [4-6]. Esta falta de evidencia epidemiológica llevó a publicaciones recientes a cuestionar la validez de estos paradigmas, argumentando que se derivaban de una comprensión funcional inadecuada de la biomecánica en la carrera [7]. Como resultado, se han propuesto nuevos paradigmas, con el objetivo de redirigir los estudios futuros a los aspectos funcionales de la carrera, centrándose en el efecto de las fuerzas internas, su influencia en la biomecánica de la carrera y cómo pueden verse afectadas por diferentes zapatillas para correr [1,8,9]. Es importante señalar que estos paradigmas novedosos no sugieren que la interpretación y el análisis de las variables tradicionales (por ejemplo, la fuerza de reacción del suelo, la cinemática conjunta) sea frívola. En cambio, estos paradigmas novedosos tienen como objetivo proporcionar nuevas perspectivas sobre la biomecánica de la carrera que se basan en una comprensión funcional de la carrera.
Uno de estos paradigmas recientemente propuestos, el paradigma de trayectoria de movimiento preferido, sugiere que es probable que los corredores mantengan una trayectoria de movimiento constante (es decir, trayectorias de movimiento) al cambiar entre zapatillas razonablemente similares (por ejemplo, zapatilla acolchada vs zapatilla de control de movimiento). Se especuló que el sistema locomotor tiene como objetivo mantener esta trayectoria de movimiento preferida, ya que puede estar asociada con una menor demanda de energía, una menor carga de las articulaciones y tejidos y/o un menor riesgo de lesión [10]. Las implicaciones potenciales han sido investigadas por un estudio reciente [11] que mostró que la pérdida de volumen de cartílago después de una carrera prolongada podría reducirse en corredores que usaban calzado que facilitaba el movimiento natural de las articulaciones de un corredor. En consecuencia, las construcciones de calzado que no soportan una trayectoria de movimiento preferida pueden ser dañinas para el sistema locomotor y pueden causar potencialmente una mayor demanda de energía/actividad muscular y/o un mayor riesgo de lesiones. Sin embargo, no se espera que la trayectoria de movimiento preferida de un corredor determinado sea constante. Más bien, puede depender de factores como la fatiga, el estado de entrenamiento, la presencia de lesiones y/o cambios sustanciales en la construcción del calzado. Por ejemplo: una trayectoria de movimiento preferida puede ser diferente en una zapatilla para correr en comparación con una bota de un trabajador. Se informó, por ejemplo, que más del 80% de los corredores exhibieron cambios de menos de 3° en la cinemática de la articulación del tobillo y la rodilla cuando corrían en dos condiciones de calzado similares [10]. Por el contrario, para una comparación más dramáticamente diferente (correr descalzo vs calzado), la mayoría de los participantes (91%) cambiaron las trayectorias de sus segmentos en más de 3°. Por lo tanto, parece que los pequeños cambios en las construcciones del calzado permiten a los corredores mantener una trayectoria de movimiento constante, mientras que las modificaciones más grandes pueden forzar adaptaciones en los patrones de la marcha.
Muchos aspectos de la trayectoria de movimiento preferida siguen siendo esquivos. No está claro, por ejemplo, cómo el aparato locomotor es capaz de mantener una trayectoria de movimiento constante a pesar de los cambios en la construcción del calzado. Además, se desconoce el papel de las construcciones de calzado con respecto a sus efectos beneficiosos y/o perjudiciales en la trayectoria de movimiento preferida de un corredor.
Se ha propuesto que los patrones de activación muscular juegan un papel importante en los principios subyacentes que gobiernan la trayectoria de movimiento preferida de un corredor [10]. Se puede especular que las adaptaciones en la actividad muscular permitirían al sistema locomotor mantener una trayectoria de movimiento que se prefiere cuando cambian las condiciones límite (por ejemplo, la construcción del calzado, la aparición de lesiones, etc.). En consecuencia, las construcciones del calzado que reducen la actividad muscular sin obligar al corredor a cambiar su trayectoria de movimiento preferida pueden ser beneficiosas (es decir, reducir los riesgos de lesiones y/o las demandas de energía). Sin embargo, cuando el aparato locomotor se ve obligado a adoptar una trayectoria de movimiento preferida novedosa, como cuando se cambia de correr descalzo a correr con zapatillas (donde los cambios cinemáticos son sustanciales), uno esperaría que la actividad muscular cambiara drásticamente para adaptarse a esta nueva situación. Estudios previos ya destacaron algunos cambios en la activación muscular cuando se comparan los pies descalzos con pies calzados con zapatillas [12,13]. Al correr descalzo, por ejemplo, se demostró que la actividad de los flexores plantares (gastrocnemio medial/lateral y sóleo) aumenta antes del golpe del talón [14] y se ha demostrado que el tibial anterior aumenta durante la fase de apoyo [15].
Por tanto, parece evidente que las estrategias de activación muscular se alteran cuando las diferencias cinemáticas son sustanciales. Estos resultados, sin embargo, aún no se han investigado a través de la lente del paradigma de trayectoria de movimiento preferida. Actualmente se desconoce cómo cambia la activación muscular cuando se mantiene una trayectoria de movimiento (es decir, pequeñas diferencias cinemáticas) en contraposición a cuando se adopta una nueva trayectoria de movimiento (es decir, grandes diferencias cinemáticas). Como resultado, el propósito de este trabajo fue investigar los cambios en la activación de los músculos de las extremidades inferiores en corredores con diferencias medias absolutas mínimas o sustanciales (≤3° o >3°) en las trayectorias del ángulo de la articulación del tobillo y la rodilla cuando se someten a diferentes tipos de calzado para correr. Específicamente, se cuantificaron los cambios absolutos medios en la integral de la activación muscular para el tibial anterior (TA), el peroneo largo (PL), el gastrocnemio medial (GM), el sóleo (SO), el vasto lateral (VL) y el bíceps femoral (BF) en seis comparaciones de calzado.
MÉTODOS
Participantes
Treinta y tres corredores de talón-punta del pie ([media ±SD]: 17 hombres: edad 31.6±9.9 años, masa 77.3±9.0 kg; y 16 mujeres: edad 28±9.9 años, masa 60±7.6 kg) participaron en este estudio. La atención se centró sobre la carrera del talón a los pies, ya que representa el patrón de pisada dominante entre los corredores [16]. Todos los participantes estaban sanos (sin lesiones durante al menos 6 meses) y eran corredores recreativos físicamente activos (al menos 2 carreras por semana). No se recopiló la distancia promedio de carrera de cada participante para una carrera determinada, pero se estimó entre 5 y 10 km, según el relato de los participantes. Todos los corredores dieron su consentimiento informado por escrito antes de participar. Este estudio fue revisado y aprobado por la Junta de Ética de Investigación en Salud Conjunta de la Universidad de Calgary con el número REB13-0275.
Protocolo
Las pruebas se realizaron en un sólo día en un laboratorio interior del Laboratorio de Rendimiento Humano de la Universidad de Calgary. Los participantes realizaron diez pruebas de carrera (aproximadamente 10 pasos por prueba) a 3.3 m/seg (±15%) en tres condiciones de calzado que variaron en sus propiedades de material (Figura 1, Tabla 1) y descalzos a lo largo de una pista de 30 m. Estos modelos de calzado fueron seleccionados para representar una amplia gama de soluciones de calzados disponibles, a saber, una zapatilla minimalista (Be), una con amortiguación convencional (Rider) y una zapatilla plana de carrera (Universe). Una diferencia importante entre los diseños del Universe y Be era que el Universe tenía una suela exterior plana y delgada con un surco en el medio en el talón de la suela exterior, mientras que el diseño Be incorporaba una suela exterior redonda y un espacio debajo del área de la punta. Cada modelo de zapatilla estaba disponible en varios tamaños y había dos pares disponibles en cada tamaño y condición. Por lo tanto, cada zapatilla de prueba era nueva o, como máximo, la habían usado dos participantes anteriores. Las cuatro condiciones de carrera se probaron en un orden aleatorio. Se tuvo especial cuidado para garantizar que los participantes se sintieran en su estilo habitual de carrera con el retropié en todas las condiciones al monitorear al corredor directamente y al confirmar la presencia de un pico de impacto y golpe de talón en los datos de fuerza y movimiento.

Figura 1. Calzados para correr evaluados.
Los modelos de zapatillas para correr evaluados en este estudio fueron Mizuno Be (izquierda), Mizuno Wave Rider (centro) y Mizuno Wave Universe (derecha).
https://doi.org/10.1371/journal.pone.0239852.g001
Tabla 1. Características físicas para cada una de las tres condiciones de calzado para la talla 9 de hombres de EE.UU.
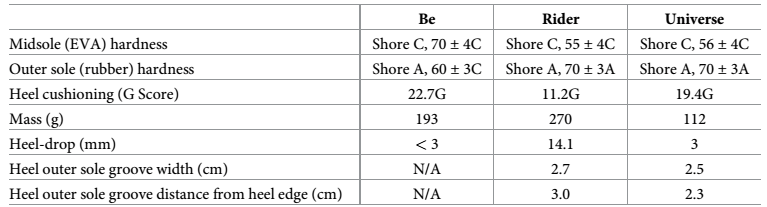
https://doi.org/10.1371/journal.pone.0239852.t001
Instrumentación
Se recolectaron trayectorias de marcadores tridimensionales (3D) de 16 marcadores retrorreflectantes utilizando un sistema de análisis de movimiento de ocho cámaras (Motion Analysis Corporation, Santa Rosa, CA, EE. UU.) operando a una frecuencia de muestreo de 240 Hz. Siguiendo una configuración informada previamente [10], se colocaron marcadores en el antepié derecho (3), el retropié (3), la tibia (3), el muslo (3) y en la espina ilíaca anterior y posterior superior derecha e izquierda (4). Se colocaron siete marcadores adicionales en el primer y quinto metatarsiano, los maléolos medial y lateral y los epicóndilos femorales, y en el trocánter mayor de la pierna derecha para recopilar datos para una prueba de pie neutral. Los datos de la prueba de pie se utilizaron para definir sistemas de coordenadas de segmento basados en los puntos de referencia anatómicos y los siete marcadores adicionales se eliminaron para las pruebas de carrera posteriores. Se sincronizó una única placa de fuerza (Kistler, 9281CA) con el sistema de análisis de movimiento y se recopilaron datos de la fuerza de reacción del suelo a 2400 Hz. Además, se colocaron luces de cronometraje a 1.9 m de distancia a lo largo de la pista para controlar la velocidad de carrera.
Además de los registros cinemáticos y cinéticos, se recopilaron datos de electromiografía de superficie (EMG) a una frecuencia de muestreo de 2400 Hz de los vientres musculares del tibial anterior (TA), peroneo largo (PL), gastrocnemio medial (GM), sóleo ( SO), vasto lateral (VL) y bíceps femoral (BF) de la misma pierna, utilizando electrodos de superficie bipolares Ag-AgCI (Norotrode Myotronics-Noromed Inc., Kent, WA, EE. UU.) con un diámetro de 10 mm y una inter-distancia entre electrodos de 22 mm. Antes de aplicar los electrodos, se afeitó la superficie de la piel, se raspó ligeramente con papel de lija y se limpió con una toallita de isopropilo. Todos los electrodos se colocaron paralelos a la dirección de las fibras musculares subyacentes según las directrices del SENIAM [17].
Finalmente, se colocó un acelerómetro unidimensional (1D) (ADXL 78, Analog Devices USA) con un rango de medición de ±50 g, y muestreo a 2400 Hz en el talón derecho y se sincronizó con los registros EMG para detectar eventos del golpe del talón (HS). Un HS se definió como el primer pico de aceleración debido al impacto del suelo.
Análisis de datos
Antes de cualquier análisis, todos los datos (cinemáticos y de EMG) se inspeccionaron visualmente para garantizar la integridad de los datos y eliminar las pruebas que mostraban artificios. Específicamente, las pruebas de carrera que no mostraron un patrón claro de golpe del retropié (determinado mediante inspección visual de datos cinemáticos) y de las señales EMG con artificios de movimiento (determinados por altas intensidades en las frecuencias más bajas del espectro de potencia) se eliminaron de los análisis posteriores. Como resultado, el número de pruebas incluidas en el análisis varió entre los participantes. Sin embargo, se aseguró un mínimo de cinco pruebas por condición de carrera. Posteriormente, los datos cinemáticos y de EMG se analizaron por separado. Las trayectorias de los marcadores cinemáticos resultantes y las señales de intensidad EMG se compararon luego entre todas las condiciones de carrera (Descalzo vs Rider/Be/Universe, Rider vs Be, Rider vs Universe, Be vs Universe).
El análisis de los datos cinemáticos se realizó como se describe en [10]. Específicamente, se utilizaron Cortex (análisis de movimiento) y Visual 3D (C-Motion Inc., Germantown, MD) para procesar datos cinemáticos y cinéticos. Las trayectorias de los marcadores se filtraron utilizando un filtro Butterworth de paso bajo de cuarto orden con una frecuencia de corte de 10 Hz. Posteriormente, se calcularon los ángulos articulares 3D del tobillo y la rodilla como la rotación relativa entre los segmentos del muslo y la tibia y los segmentos de la tibia y el retropié, respectivamente, utilizando una secuencia de rotación cardánica X-Y-Z. Todos los ángulos articulares se expresaron en relación con la postura del pie y se normalizaron temporalmente a la fase de apoyo. La fase de apoyo se definió como el período entre la amortiguación y el despegue, que se identificaron utilizando un umbral de 10 N en la fuerza de reacción vertical del suelo. Finalmente, utilizando scripts personalizados de Matlab, se calcularon las diferencias absolutas en las trayectorias del movimiento cinemático y se promediaron para la articulación del tobillo/rodilla durante la fase de apoyo normalizada en el tiempo (0-100%) para cada participante y comparación (Figuras 2 y 3). Para este estudio, los corredores se agruparon en aquellos que mostraban diferencias medias absolutas en trayectorias de movimiento inferiores o iguales a 3°, y corredores con diferencias medias absolutas en trayectorias de movimiento superiores a 3°, lo que representa un umbral conservador para la relevancia clínica como se sugiere en [10].
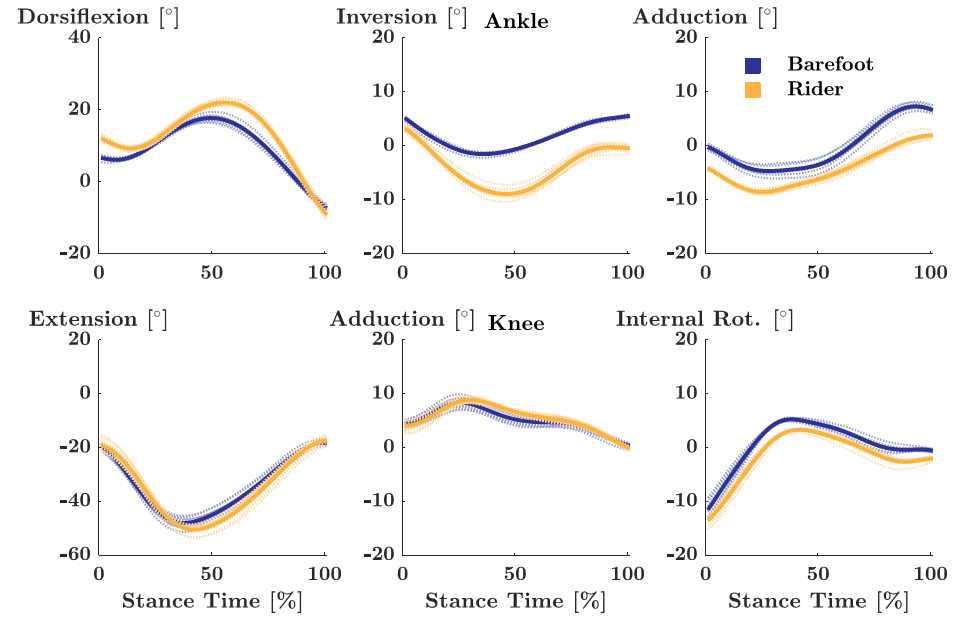
Figura 2. Ejemplo de la cinemática de la articulación de la rodilla y el tobillo en descalzo y con zapatillas Rider.
Cinemática articular normalizada en tiempo promedio (línea sólida) e individual (línea punteada) para el tobillo (arriba) y rodilla (abajo) de un participante representativo en condición descalzo (azul) y con zapatillas Rider (amarillo). https://doi.org/10.1371/journal.pone.0239852.g002
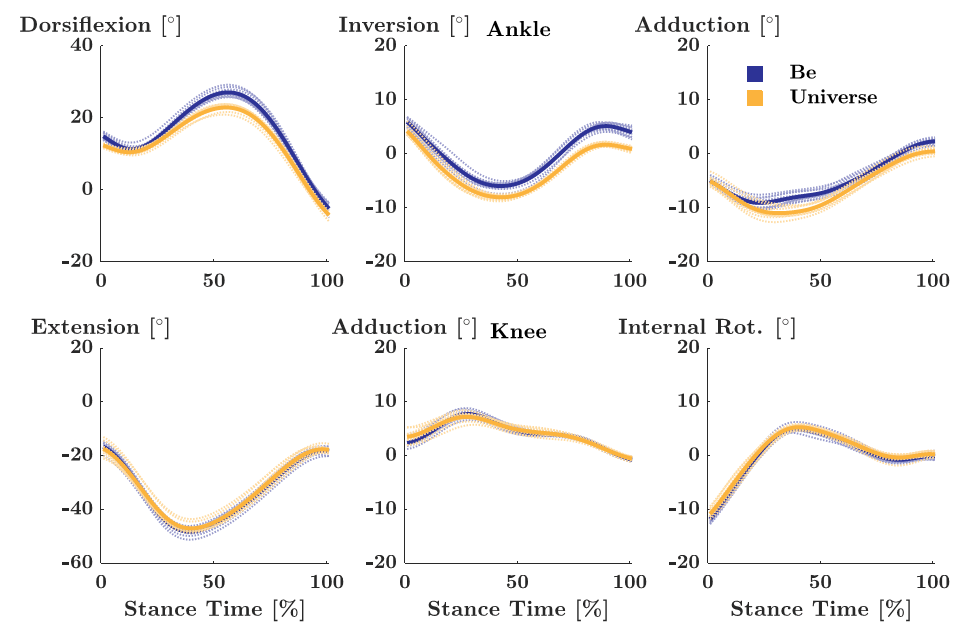
Figura 3. Ejemplo de la cinemática de la articulación de la rodilla y el tobillo con zapatillas Be y Universe.
Cinemática articular normalizada en tiempo promedio (línea sólida) e individual (línea punteada) para el tobillo (arriba) y rodilla (abajo) de un participante representativo en condición con zapatillas Be (azul) y con zapatillas Universe (amarillo).
https://doi.org/10.1371/journal.pone.0239852.g003
Se procesaron los datos de EMG usando un script de Matlab para analizar el mismo paso como los datos de la cinemática, habilitando así las comparaciones entre las dos series de datos. Una ventana de 300 ms (es decir, 150 ms antes de 150 ms después de HS) se analizó para todos los participantes.
Para cada paso y músculo, la señal de EMG cruda se expuso a una onda transformada con 13 pequeñas ondas no-linealmente esclaonadas (las frecuencias de centro: 6.9, 19.3, 37.7, 62.1, 92.4, 128.5, 170.4, 218.1, 271.5, 330.6, 395.4, 465.9, 542.1 Hz) para representar la señal en el espacio de tiempo-frecuencia [18,19]. Luego, cada señal de EMG se normalizó a la suma de las pequeñas ondas sobre 100 Hz (pequeñas ondas de 6 a 13) de la media de la condición de estar descalzo. Este paso redujo el efecto de artificios de movimiento potenciales que son asociados con los componentes de frecuencia inferiores (<100 Hz). Como consecuencia, la raíz cuadrada del espacio de tiempo-frecuencia normalizado se sumó para todas las frecuencias para obtener la señal de intensidad de EMG respectiva, de la cual se calculó el área bajo la curva (AUC). Para cada participante, las diferencias absolutas medias en el AUC entonces fueron calculadas para todas las seis comparaciones (Descalzo vs Rider/Be/Universe, Rider vs BE, Rider vs Universe, Be vs Universe) y cada músculo (TA, PL, GM, SO, VL, BF). El resultado luego se expresó como porcentaje con respecto a la primera de las dos condiciones de carrera en cada comparación (es decir, descalzo, Rider, o Be).
Estadística
Se usaron tests de línea asignados de Wilcoxon con una corrección de Bonferroni-Holm para analizar los cambios en el AUC en los corredores que demostraban mínimas/sustanciales (≤3° / >3°) diferencias en las trayectorias 3D del ángulo articular estratificadas para las seis posibles comparaciones de calzado. Un valor p obtenido menor que el nivel de alfa corregido, indicaba cambios significativos en la activación muscular en una comparación determinada de las condiciones de carrera.
Resultados
La proporción promedio de participantes con diferencias absolutas promedio en las cinemáticas articular de ≤3° y >3° para las comparaciones descalzo a las comparaciones con calzados fueron 57% y 43%, respectivamente (Tabla 2: descalzo vs calzado). En las comparaciones descalzo a calzado, en promedio el 100% de los corredores tenían diferencias medias absolutas en la cinemática articular de ≤3° (Tabla 2: descalzado vs calzado), mientras ningún corredor cambió su cinemática articular promedio por más de 3°.
Tabla 2. Número de participantes estratificado por comparaciones.
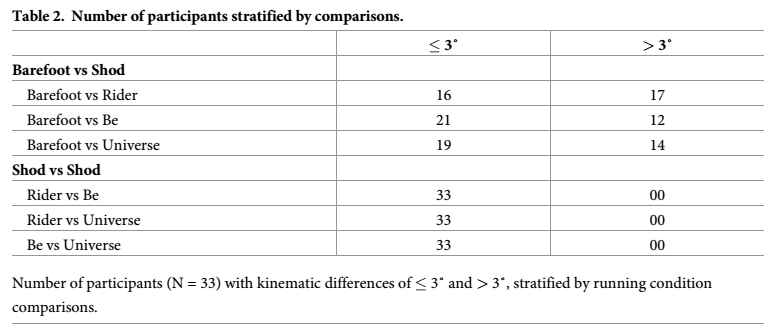
https://doi.org/10.1371/journal.pone.0239852.t002
En los corredores con diferencias cinemáticas de ≤3° a través de las comparaciones de de las diferencias absolutas promedio de carrera en el AUC para todos los músculos fueron 19% para las comparaciones descalzo a calzado y 10% para las comparaciones calzado a calzado (Fig. 4). Específicamente, para las comparaciones descalzado a calzado, las diferencias absolutas medias en el TA, PL, GM, PSO, VL, y BF fueron 35%, 11%, 17%, 10%, 27%, y 16%, respectivamente. La actividad del TA difirió significativamente al compararse estar descalzo con el calzado BE y al compararse descalzo al calzado Universe (p <0.001 para ambos). La actividad del VL fue significativamente diferente al comparar descalzo vs Rider (p = 0.001). Al comparar entre las condiciones de las zapatillas, las diferencias en la EMG fueron sustancialmente menores. En promedio, las diferencias absolutas en el TA, PL, GM, SO, VL, y BF fueron 10%, 9%, 13%, 8%, 8%, y 12%, respectivamente.
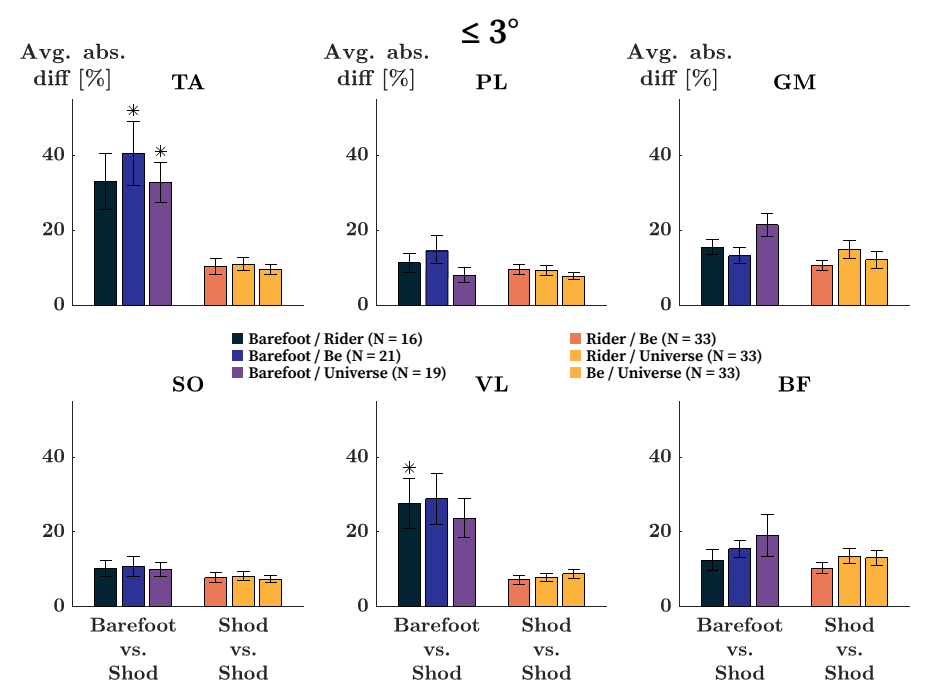
Figura 4. Cambios en la actividad EMG en los corredores con diferencias cinemáticas ≤3°.
Diferencias absolutas medias en el integral de las señales de la EMG del tibial anterior (TA), peroneo largo (PL), gemelos mediales (GM), sóleo (SO), vasto externo (VL), y bíceps femoral (BF) en corredores con diferencias en cinemáticas articulares ≤3°. * Integrales significativamente diferentes en la comparación dada (valor p ≤0.002).
https://doi.org/10.1371/journal.pone.0239852.g004
Las diferencias cinemáticas de más de 3° sólo se observaron en las comparaciones de descalzo con calzado (Tabla 2). En estas comparaciones, las diferencias absolutas medias en el AUC para todos los músculos fueron de 12% (Fig. 5). Las diferencias promedio estratificadas para los músculos fueron 39%, 14%, 16%, 16%, 25%, y 24% para el TA, PL, GM, SO, VL, y BF respectivamente. En todas las tres comparaciones de descalzo con calzado (Descalzo vs Rider/Be/Universe), las diferencias en la actividad del TA y VL fueron significativas (TA: p <0.001, p = 0.002, p = 0.001; VL: p = 0.001, p = 0.002, p = 0.002). En sólo la comparación descalzo con Universe, los cambios observados en el GM fueron también significativos (p = 0.002).
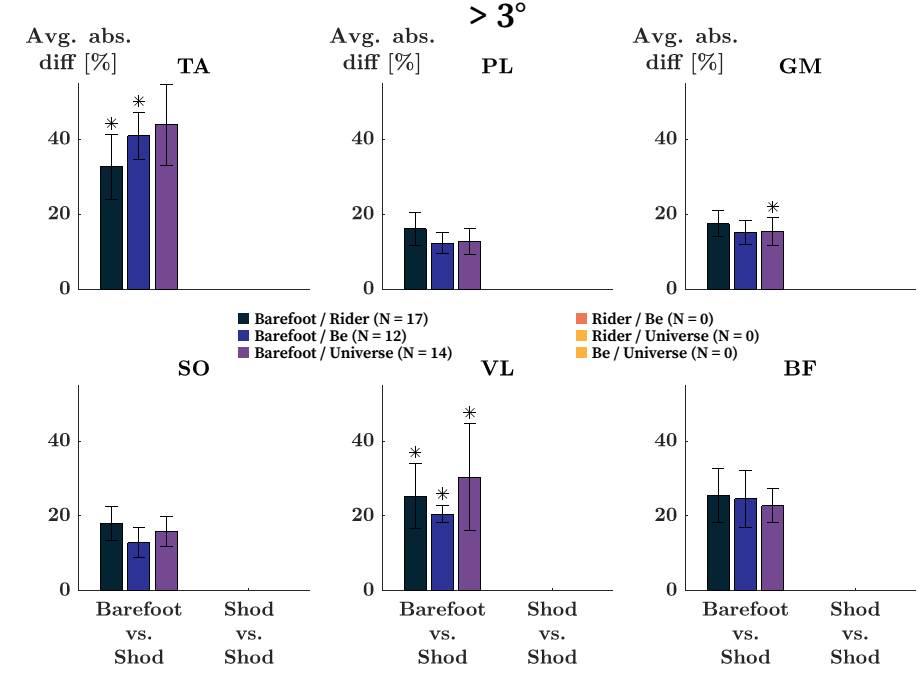
Figura 5. Cambios en la actividad EMG en corredores con diferencias cinemáticas >3°.
Diferencias medias absolutas en la integral de las señales de EMG del tibial anterior (TA), el peroneo largo (PL), el gastrocnemio medial (GM), el sóleo (SO), el vasto lateral (VL) y el bíceps femoral (BF) en los corredores que mostraron diferencias en la cinemática articular >3°. * Integrales significativamente diferentes en la comparación dada (valor p ≤ 0.002).
https://doi.org/10.1371/journal.pone.0239852.g005
Discusión
El paradigma de la trayectoria de movimiento preferida se ha propuesto como un reemplazo de los paradigmas tradicionales (es decir, fuerza de impacto, pronación). Su objetivo es proporcionar una perspectiva novedosa sobre la biomecánica de la carrera que se basa en una comprensión funcional de la carrera [1]. Sin embargo, muchos aspectos del paradigma de la trayectoria de movimiento preferida siguen siendo controvertidos y poco claros [20,21]. Como resultado, su concepto será esbozado primero con el fin de discutir los hallazgos de este trabajo dentro del alcance del paradigma novedoso.
El paradigma de la trayectoria de movimiento preferida sugiere que los individuos que realizan una tarea determinada (por ejemplo, correr, saltar, etc.), adoptan inconscientemente un patrón de movimiento (es decir, trayectorias de movimiento cinemático) que se prefiere bajo el conjunto real de restricciones/condiciones de la limitación (es decir, estado de entrenamiento, calzado, etc.). Se cree que este patrón de movimiento preferido (o trayectoria de movimiento) es la solución óptima (o al menos muy cercana) para una tarea dada [8]. En otras palabras, el sistema locomotor afina sus parámetros internos (es decir, activación muscular) para realizar la tarea en cuestión de manera óptima. Es importante señalar aquí que óptimo no significa exclusivamente más económico (es decir, consumo de energía reducido). En cambio, el sistema locomotor tiene como objetivo optimizar para múltiples factores. Los posibles criterios de optimización pueden incluir una mayor sensación de comodidad, una reducción del dolor percibido y/o una reducción del riesgo de lesiones, además de una reducción del consumo de energía. Como resultado, la solución a este problema de optimización es la trayectoria de movimiento preferida.
Si bien actualmente se desconoce cómo determinar una trayectoria de movimiento preferida antes de la ejecución de una tarea motriz, se ha especulado que la observación de los cambios en los patrones de movimiento (es decir, las trayectorias de los ángulos articulares) puede permitir a los investigadores determinar si las trayectorias de movimiento preferidas eran similares en diferentes intervenciones [10]. Siguiendo esta noción, las pequeñas desviaciones cinemáticas pueden interpretarse como la misma trayectoria de movimiento en todas las intervenciones, mientras que las desviaciones cinemáticas más grandes pueden interpretarse como diferentes trayectorias de movimiento preferidas. Para el presente trabajo, se aplicó un umbral de 3° a la diferencia absoluta media en las trayectorias de movimiento cinemático en las comparaciones de la carrera. Este umbral se seleccionó porque representa un umbral conservador de relevancia clínica y se sugirió en trabajos anteriores [10]. Por lo tanto, se consideró que los corredores que cambiaron su patrón de movimiento en menos o exactamente 3° tuvieron la misma trayectoria de movimiento en todas las intervenciones, mientras que los corredores que cambiaron su patrón de movimiento en más de 3° podrían haber seleccionado una trayectoria de movimiento novedosa (más preferida) para la nueva intervención.
Para ambos grupos (≤3° y >3°), el paradigma de la trayectoria de movimiento preferida tiene implicaciones específicas con respecto al ajuste de los parámetros internos (es decir, activación muscular) en una situación en la que se alteraron las restricciones (es decir, el calzado), pero la tarea (es decir, correr a 3.3 m/seg) siguió siendo la misma. Por ejemplo, cuando las restricciones se alteran marginalmente (es decir, comparaciones de calzado con calzado), uno esperaría pequeñas adaptaciones en los parámetros internos en los corredores que mantuvieron la misma trayectoria de movimiento (≤3°). Sin embargo, cuando las restricciones se alteran drásticamente (es decir, comparaciones entre pies descalzos y calzados), uno esperaría grandes adaptaciones en los parámetros internos, ya que esa es la única forma en que un corredor podría mantener la misma trayectoria de movimiento en la nueva situación. Para los corredores que adoptan una nueva ruta de movimiento preferida (>3°), uno esperaría parámetros internos muy alterados, cuando las restricciones permanecieron similares, sino también cuando las restricciones se alteran drásticamente.
En el presente trabajo, se pidió a los participantes que corrieran sobre el suelo a 3.3 m/seg en cuatro condiciones de carrera diferentes (Descalzo/Rider/Be/Universe). Con respecto al paradigma de trayectoria de movimiento preferida, este describe la misma tarea con restricciones alteradas. Las comparaciones entre las condiciones del calzado (es decir, Rider vs Be, etc.) se consideran pequeños cambios en las restricciones, mientras que las comparaciones entre descalzo y calzado describen grandes cambios en las restricciones. Como tal, los resultados de este estudio apoyan las especulaciones del esquema anterior: pequeñas adaptaciones en la EMG en corredores que mantuvieron una trayectoria de movimiento al cambiar entre zapatillas para correr (Figura 4; calzado a calzado), grandes adaptaciones en la EMG en corredores que mantuvieron una trayectoria de movimiento pero cambió entre pies descalzos y calzados (Figura 4; descalzo a calzado), y grandes adaptaciones en la EMG en corredores que adoptaron una nueva trayectoria de movimiento preferida (Figura 5).
Si bien estos resultados fortalecen el sustento del paradigma de la trayectoria de movimiento preferida, no proporcionaron ninguna explicación de por qué algunos corredores mantuvieron una trayectoria de movimiento preferida y otros no, a pesar de una tarea idéntica. Desde una perspectiva funcional, se podría especular que, basándose en la experiencia (o pericia) de correr, algunos corredores estarían más o menos dispuestos a adoptar una trayectoria de movimiento novedosa. Específicamente, es menos probable que los corredores más experimentados cambien un patrón de movimiento preferido (incluso bajo restricciones muy diferentes) porque su patrón de movimiento actual está lo más cerca posible de la solución óptima. Por el contrario, en los corredores menos experimentados puede haber una solución ligeramente más óptima para la tarea dada y, al adoptar una nueva trayectoria de movimiento preferida, realizan el movimiento de una manera más óptima. El nivel de experiencia de los corredores que participaron en este estudio, lamentablemente, no fue cuantificado. Por lo tanto, la estratificación de la respuesta de los corredores en función del nivel de experiencia debe considerarse en futuras investigaciones.
Desde una perspectiva metodológica, la selección de un umbral de 3° puede presentar algunas limitaciones, ya que un umbral que indica que una transición a una nueva trayectoria de movimiento preferida puede ser específica del corredor en lugar de global. Trabajos anteriores, por ejemplo, han demostrado que los movimientos de las articulaciones, que resultan en una menor cantidad de resistencia, son muy variables entre los individuos y específicos de un tipo dado [22,23]. Además, este estudio combinó las desviaciones en la cinemática de la articulación del tobillo y la rodilla en los tres planos dentro de una sola medición, mientras que se ha demostrado que ciertos componentes articulares cumplen mejor con el concepto de trayectoria de movimiento preferida que otros [10]. Además, se puede argumentar que la diferencia media absoluta en las trayectorias articulares no es una medida adecuada de cambio. Si bien el estudio actual siguió un ejemplo anterior [10], sería interesante explorar otras metodologías para estratificar las respuestas cinemáticas. Una comparación entre múltiples metodologías, por ejemplo, puede proporcionar evidencia más sólida para el paradigma. Por lo tanto, se recomienda que los estudios futuros revalúen cómo determinar las desviaciones de una trayectoria de movimiento preferida.
Las interpretaciones de este estudio deben realizarse teniendo en cuenta las siguientes limitaciones. Primero, a los participantes no se les dio un período de adaptación después de cambiar entre las condiciones de carrera. Un período de adaptación prolongado puede haber resultado en desviaciones más pequeñas en las trayectorias de los ángulos de las articulaciones, reduciendo en última instancia el número de participantes que seleccionaron una nueva trayectoria de movimiento preferida en la nueva condición de carrera. Sin embargo, teniendo en cuenta que todos los participantes mostraron diferencias mínimas (≤3°) en la cinemática de las articulaciones en todas las comparaciones de calzado con calzado, esto fortalecería la perspectiva del paradigma. Con respecto a las comparaciones con los pies descalzos y los pies calzados, una reducción en los participantes que cambiaron su trayectoria de movimiento preferida indicaría que correr descalzo no es tan diferente de correr calzado como se especuló inicialmente. Para analizar esta especulación, los estudios futuros podrían explorar el efecto de los períodos de adaptación prolongados sobre los cambios en la cinemática de las articulaciones e investigar construcciones de calzado más drásticas (es decir, botas de trabajo, descalzo, calzado para correr, etc.). En segundo lugar, los resultados de este estudio se han discutido bajo la luz del paradigma de la trayectoria de movimiento preferida. Si bien el paradigma explica los resultados de este estudio, el paradigma en sí no es ampliamente aceptado. El presente trabajo y la mayor parte de la investigación sobre el paradigma fue realizada por el equipo de investigación del Dr. Benno Nigg. Este hecho resalta un potencial sesgo de investigación con respecto al paradigma y es posible que los hallazgos del presente trabajo también puedan interpretarse de manera diferente. Finalmente, se especuló que el sistema locomotor tiene como objetivo optimizar múltiples factores (es decir, consumo de energía, comodidad, etc.). Sin embargo, el presente trabajo no evaluó ninguno de estos posibles factores de optimización y no proporciona ninguna evidencia para esta especulación. Por lo tanto, se recomienda que las investigaciones futuras incorporen una evaluación de los posibles factores de optimización al investigar el paradigma de la trayectoria de movimiento preferida.
Conclusión
Se puede mantener una trayectoria de movimiento con pequeñas adaptaciones en la activación muscular cuando las condiciones de carrera son similares, mientras que se necesitan grandes adaptaciones en la activación muscular cuando las condiciones de carrera son drásticamente diferentes. Cuando no se mantiene una trayectoria de movimiento, las adaptaciones en la activación muscular son drásticas.
Información de apoyo
S1.
https://doi.org/10.1371/journal.pone.0239852.s001
Agradecimientos
Agradecemos a Amiée C. Smith por su trabajo inicial sobre este tema y por recopilar los datos presentados en este trabajo.
E-mail: fabian.hoitz@ucalgary.ca
Disponibilidad de datos: Todos los datos relevantes se encuentran en el documento y sus archivos de información de respaldo.
Referencias
1. Nigg B, Baltich J, Hoerzer S, Enders H. (2015). Running shoes and running injuries: Mythbusting and a proposal for two new paradigms: “Preferred movement path” and “comfort filter. ” Br J Sports Med. 2015;49: 1290–1294. pmid:26221015
2. Bates BT. (1989). Comment on “The influence of running velocity and midsole hardness on external impact forces in heel-toe running. ” J Biomech. 1989;22: 963–965. pmid:2575614
3. Nigg BM, Nurse MA, Stefanyshyn DJ. (1999). Shoe inserts and orthotics for sport and physical activities. Med Sci Sport Exerc. 1999;31: S421–S428. pmid:10416543
4. van Mechelen W. (1992). Running Injuries. Sport Med. 1992;14: 320–335. pmid:1439399
5. van Middelkoop M, Kolkman J, Van Ochten J, Bierma-Zeinstra SMA, Koes B. (2008). Prevalence and incidence of lower extremity injuries in male marathon runners. Scand J Med Sci Sport. 2008;18: 140–144. pmid:17555538
6. van Gent RN, Siem D, Van Middeloop M, Van Os AG, Bierma-Zeinstra SMA, Koes BW. (2007). Incidence and determinants of lower extremity running injuries in long distance runners: A systematic review. Sport en Geneeskd. 2007;40: 16–29. pmid:17473005
7. Nigg B, Mohr M, Nigg S. (2017). Muscle tuning and preferred movement path–a paradigm shift. Curr Issues Sport Sci. 2017;2: 1–12.
8. Nigg B.M. (2010). Biomechanics of sport shoes. University of Calgary; 2010.
9. Nigg B.M. (2001). The role of impact forces and pronation: a new paradigm. Clin J Sport Med. 2001;11: 2–9. pmid:11176139
10. Nigg B.M., Vienneau J, Smith AC, Trudeau MB, Mohr M, Nigg SR. (2017). The preferred movement path paradigm: Influence of running shoes on joint movement. Med Sci Sports Exerc. 2017;49: 1641–1648. pmid:28277405
11. Willwacher S, Mählich D, Trudeau MB, Hamill J, Weir G, Brüggemann GP, et al. (2020). The habitual motion path theory: Evidence from cartilage volume reductions in the knee joint after 75 minutes of running. Sci Rep. 2020;10: 1–7. pmid:31913322
12. Beierle R, Burton P, Smith H, Smith M, Ives SJ. (2019). The Effect of Barefoot Running on EMG Activity in the Gastrocnemius and Tibialis Anterior in Active College-Aged Females. Int J Exerc Sci. 2019;12: 1110–1120. Available: http://www.ncbi.nlm.nih.gov/pubmed/31839842 http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid = PMC6886612 pmid:31839842
13. Kelly LA, Lichtwark GA, Farris DJ, Andrew C. (2016). Shoes alter the spring like function of the human foot during running. J R Soc Interface. 2016;13: 20160174. pmid:27307512
14. Hall JPL, Barton C, Jones PR, Morrissey D. (2013). The biomechanical differences between barefoot and shod distance running: A systematic review and preliminary meta-analysis. Sport Med. 2013;43: 1335–1353. pmid:23996137
15. Olin ED, Gutierrez GM. (2013). EMG and tibial shock upon the first attempt at barefoot running. Hum Mov Sci. 2013;32: 343–352. pmid:23643493
16. Larson P, Higgins E, Kaminski J, Decker T, Preble J, Lyons D, et al. (2011). Foot strike patterns of recreational and sub-elite runners in a long-distance road race. J Sports Sci. 2011;29: 1665–1673. pmid:22092253
17. Hermens HJ, Freriks B, Merletti R, Stegeman D, Blok J, Rau G, et al. (1999). European recommendations for surface electromyography. Roessingh Res Dev. 1999;8: 13–54.
18. Barandun M, von Tscharner V, Meuli-Simmen C, Bowen V, Valderrabano V. (2009). Frequency and conduction velocity analysis of the abductor pollicis brevis muscle during early fatigue. J Electromyogr Kinesiol. 2009;19: 65–74. pmid:17986395
19. von Tscharner V. (2000). Intensity analysis in time-frequency space of surface myoelectric signals by wavelets of specified resolution. J Electromyogr Kinesiol. 2000;10: 433–45. pmid:11102846
20. Federolf P, Doix A-CM, Jochum D. (2018). A discussion of the Muscle Tuning and the Preferred Movement Path concepts–comment on Nigg et al. Curr Issues Sport Sci. 2018.
21. Vanwanseele B, Zhang X, Schütte K. (2018). Muscle tuning and preferred movement path: do we need a paradigm shift or should we redefine the old?–comment on Nigg et al. Curr Issues Sport Sci. 2018.
22. Wilson DR, Feikes JD, Zavatsky AB, Bayona F, O’Connor J. (1996). The one degree-offreedom nature of the human knee joint—basis for a kinematic model. Proceedings, Ninth Biennial Conference. 1996. pp. 194–195.
23. Trudeau MB, Willwacher S, Weir G, Rohr E, Ertel C, Bruggemann GP, et al. (2019). A novel method for estimating an individual’s deviation from their habitual motion path when running. Footwear Sci. 2019; 1–11.