
Modelos Segmentarios para el Pie y Tobillo
Publicado 11 de abril de 2013, 0:15
En el blog anterior presentamos los sistemas corporales totales (SC-14 al SC-18) donde se expuso como el cuerpo humano puede ser distribuido y modelado para los diferentes análisis biomecánicos como una totalidad con el fin de abordar el problema de la complejidad y no incluir toda la cantidad posible de segmentos . En este blog trataremos más específicamente la profundización que han hecho algunos trabajos científicos de grupos investigativos en biomecánica sobre los modelos que se utilizan en pequeños grupos segmentarios para estudios muy especializados y sectorizados. Este blog está dedicado a presentar algunos de los modelos biomecánicos para el estudio del pie y el tobillo tomados de la amplia variedad encontrada en la literatura científica
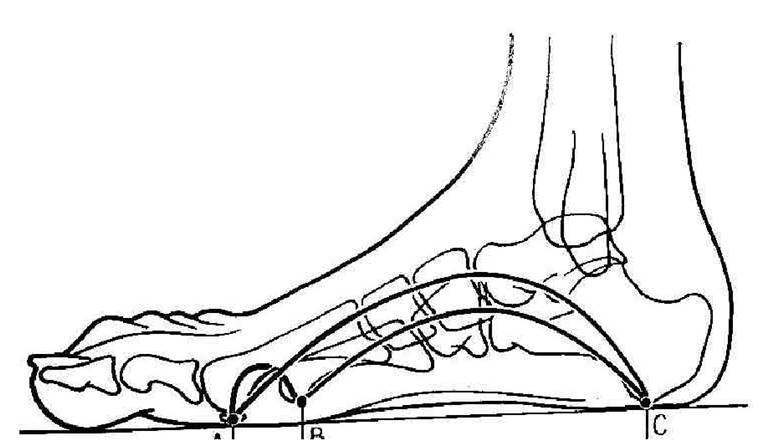
Figura 1. Estructura compleja del pie vista desde el plano lateral medial
En el estudio biomecánico del pie y del tobillo generalmente este, es concebido como un solo segmento tal como lo hacen los sistemas SC-14 al SC-18 pero sabemos que la unidad del pie-tobillo es muy compleja pues tiene una estructura consistente en 107 ligamentos, 19 músculos intrínsecos, 26 huesos, 57 articulaciones y 3 ejes de movilidad, adicionando, que una persona promedio puede caminar en la vida 150,000 kilómetros (ver figura 1). La combinación de todos estos factores hace que esta unidad morfológica y funcional sea estudiada en biomecánica con suprema profundidad en términos de movilidad normal, funcional y patológica en ambientes del ejercicio, deporte y clínico
Modelos
El primer modelo aquí presentado fue desarrollado por Cheung. JT y Zhang M (2006) es denominado como el modelo comprensivo por elementos finitos (MCEF) del tobillo y pie humano en 3D y fue propuesto desde la Universidad Politécnica de Hong Kong y del Laboratorio de Rendimiento Humano en la Facultad de kinesiología de la Universidad de Calgary. Este es utilizado para cuantificar la interacción biomecánica entre ligamentos y huesos y entre la planta del pie con diferentes soportes bajo varias condiciones de carga.
El Modelo (MCEF) presentado en la figura 2, consiste, en 28 segmentos óseos incluyendo los segmentos distales de la tibia y fíbula más los 26 huesos del pie: calcáneo, cuboides, navicular, 3 cuneiformes, 5 metatarsos y 14 componentes de las falanges envueltos en un volumen de tejido suave. Las falanges fueron conectadas con elementos sólidos de 2 mm que simularon los cartílagos y otros tejidos conectivos
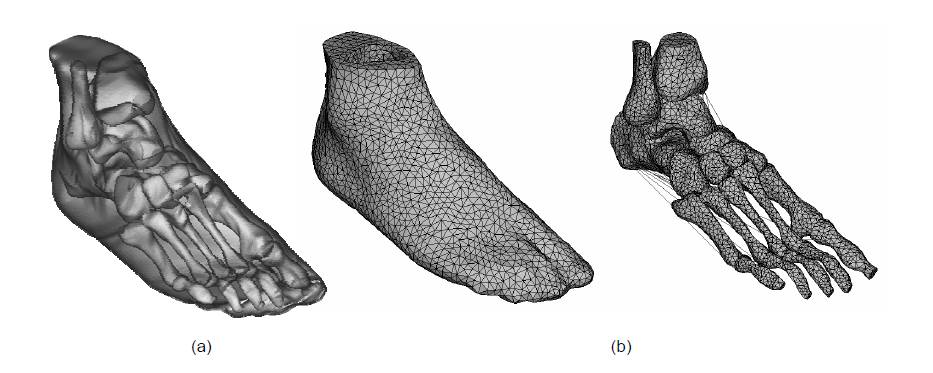
Figura 2. El modelo comprensivo por elementos finitos (MCEF) del tobillo y pie humano en 3D donde: (a) Modelo de la superficie y (b) modelo de la masa del tejido suave encapsulado y de las estructuras óseas. Tomado de Cheung. JT y Zhang M (2006)
El siguiente modelo fue diseñado por Simón J., Metaxiotis D., Siebel A.,. Bock H. G. y Döderlein L. (2006) en el Centro Científico de Computación, IWR en Heidelberg es llamado el modelo de los 7 segmentos y es computado por BodyBuilder (OxfordMetrics) y MatLab software. Este modelo consiste en 7 segmentos a saber: Tibia, Talón, Retro pié, Medio pie, Ante pie, Arco medial y 1 dedo o Hallux. Un total de 16 marcadores anatómicos 3D (ver figura 3) fueron colocados sobre cada pierna para medir y analizar cualitativa y cuantitativamente las formas de normales y patológicas de la locomoción humana
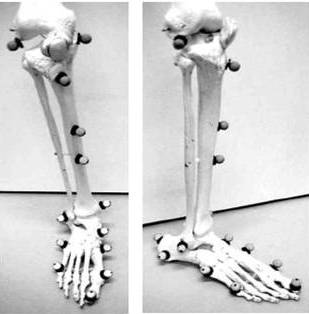
Figura 3. Modelo de los 7 segmentos del pie y tobillo humano en el plano frontal y lateral. Simon J., Metaxiotis D., Siebel A., Bock H. G. y Döderlein L. (2006)
El tercer modelo fue creado por Bishop C, Paul G. y and Thewlis D. (2012) de la Universidad del Sur en Adelaida, Australia, es denominado el modelo cinematico de los 4 segmentos del pie y tobillo y su relación con el calzado en movimientos de locomoción (marcha, trote, ascensos, descensos y carrera). Los 4 segmentos analizados son pierna, retro-pie, complejo medio-pie y ante-pie y dedo Hallux. Para definir los parámetros del modelo y los momentos de inercia de cada segmento un escaneo CT fue tomado a cada uno de los 24 pies en estudio. La reconstrucción de la geometría ósea en 3D fue hecha desde imágenes en escala de grises con el uso del software Simpleware. En la figura 4 se presenta este modelo para una mejor ilustración

Figura 4. Modelo de los 4 segmentos para cuantificar la cinemática entre la interacción de calzado y pie (Bishop C, Paul G. y and Thewlis D. (2012))
El cuarto modelo interpretado en este blog es el de S. M. Kidder, F. S. Abuzzahab, Jr., G. F. Harris, y J. E. Johnson (1996) del Departamento de Ingeniería Biomédica de la Universidad de Marquette en Milwaukee USA. Ellos crearon un modelo denominado el Modelo Milwaukee que consiste en analizar 4 segmentos del complejo pie-tobillo a saber: (1) tibia y fíbula, (2) calcáneo, talón y navicular, (3) cuneiformes, cuboides y metatarsos y (4) el dedo hallux. Un sistema de 5 cámaras Vicon de Oxford Metrics fueron utilizadas para adquirir los datos del movimiento del pie y tobillo. El método de Euler fue usado para describir la orientación relativa de los segmentos antes mencionados. Su utilización es muy amplia para análisis cinemático de todo tipo de locomoción humana incluyendo la marcha, trote, carrera en condiciones normales y clínicas.
En la figura 5 se presenta una diagramación original de los huesos del pie derecho vistos en los planos superior, posterior y lateral. Un total de 12 sensores son utilizados en cada complejo pie-tobillo La visión posteriortiene 5 puntos negros que representan los sensores localizados en las protuberancias óseas correspondientes. Dos de ellos son localizados medialmente, 2 lateralmente y 1 en la parte posterior del talón. La visión lateral tiene 8 sensores: tres de ellos están sobre un espigo vertical localizado entre el dedo I y II y distribuidos en los ejes x,y z. Dos sensores están sobre la cabeza y base del 5 metatarsiano. La visión superior tiene 11 sensores visibles que pertenecen a las otras visiones menos uno de ellos que está localizado en la cabeza del primer metatarsiano
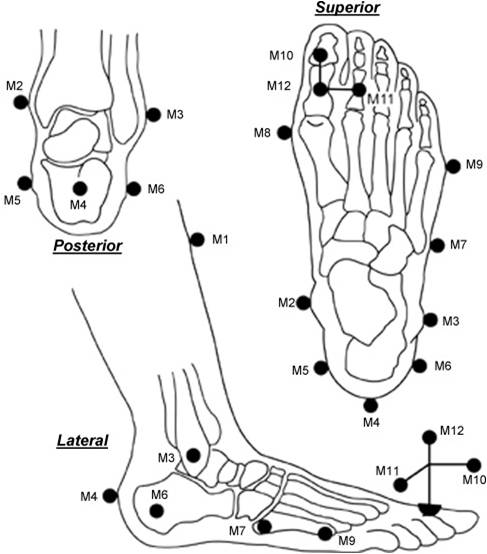
Figura 5. Localización triplanar (3P) original de los sensores utilizados en el modelo del pie de Milwaukee. S. M. Kidder, F. S. Abuzzahab, Jr., G. F. Harris, andJ. E. Johnson (1996)
El siguiente sistema es denominado el Modelo del Pie de Oxford y fue creado por Carson, M. C., Harrington, M. E., Thompson, N., et al en el 2001 del centro de ingeniería ortopédica la universidad de Oxford, UK, con el objetivo de desarrollar un modelo multi-segmental y un sistema de medición aplicable a la marcha y otras actividades de locomoción humana utilizables en la investigación y en el análisis clínico. Este modelo simplifica la complejidad del comportamiento de los 28 huesos que tiene el pie, a tres segmentos que son: (1) Retropié, (2) Ante pié y Hallux y (3) tibia. (Ver figura 6)
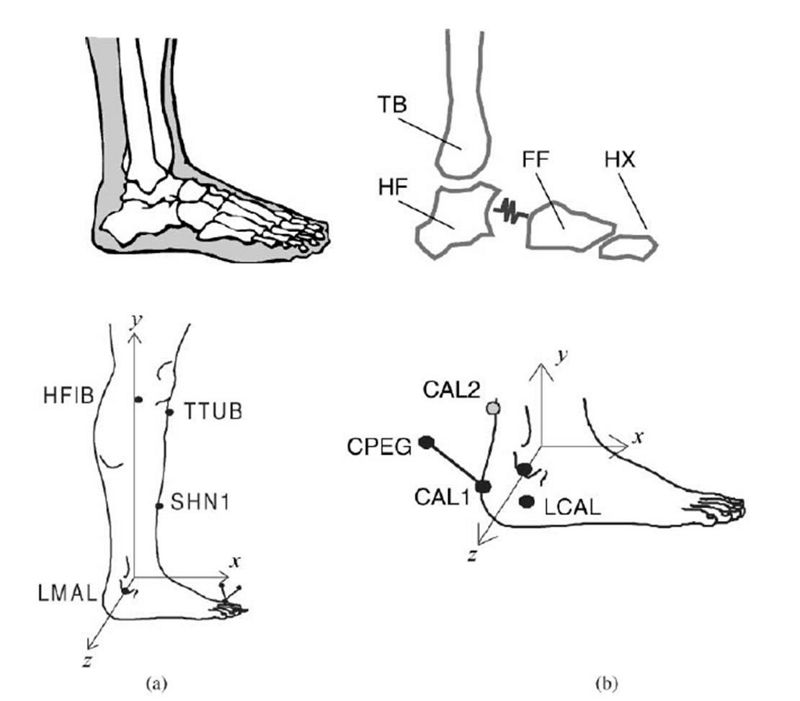
Figura 6. Diagrama del modelo del pie de Oxford con sus tres segmentos corporales (1) TB = tibia,(2) HF= retropié y (3) FF+HX= ante pié y hallux y con el sistema de coordenadas somáticas xyz en la tibia (a) y en el tobillo(b). Carson, M. C., Harrington, M. E., Thompson, N., et al en el 2001
El medio pie es considerado con su papel de transmitir movimiento entre el retropié y el ante pié. El movimiento relativo es descrito sin restricciones inter-segmentarias es decir actuando con seis grados de libertad entre cualquier par de segmentos, Un total de 16 marcadores lumínicos (ver figura 7) son utilizados en este modelo para medir los movimientos inter-segmentarios de los siguientes factores:
* TB/FL: tibia con respecto al piso.
* HF/TB: retropié con respecto a la tibia
* FF/HF: ante pie con respecto al retro pie
* HX/FF: Hallux con respecto al ante pié.
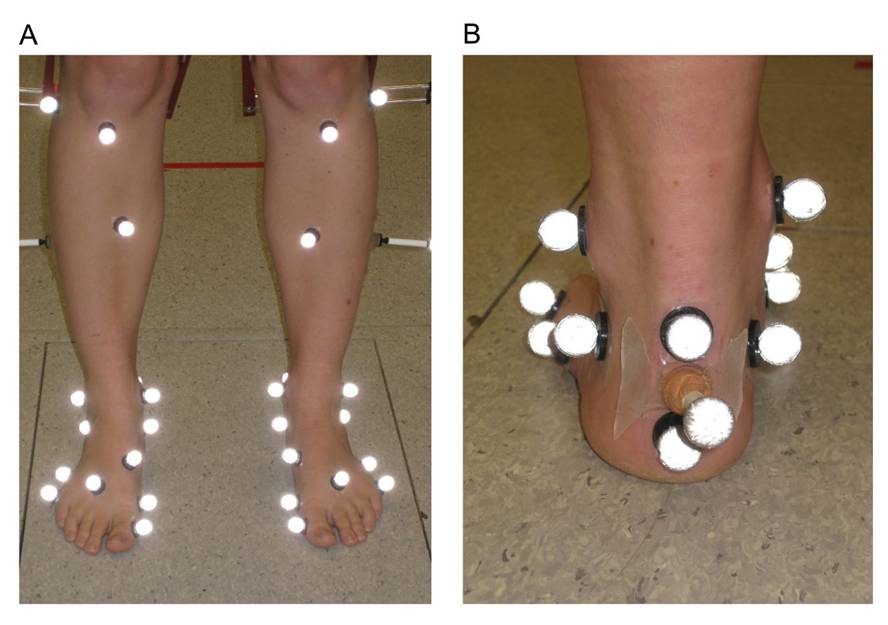
Figura 7. Distribución de los Marcadores lumínicos del modelo de Oxford en el plano frontal anterior (A) y posterior (B)
Un sexto modelo en este blog, fue creado en la Universidad de Colonia, Alemania y fue propuesto por Arampatzis, A.,Bruggemann, G.P.,Klapsing,G.M en el 2002. Este modelo es en 3D de la pierna-pie para determinar el movimiento en condiciones más dinámicas en el aterrizaje humano especialmente en gimnasia. Un total de 7 segmentos fueron considerados para este modelo: (1) Tibia y Fíbula,(2) Talón, (3) Calcáneo,(4) Navicular + tres cuneiformes + metatarsales I,II,III, (5) Cuboides +metatarsales IV,V, (6)falanges I, II, III y (7) Falanges IV ,V. (Ver figura 8)
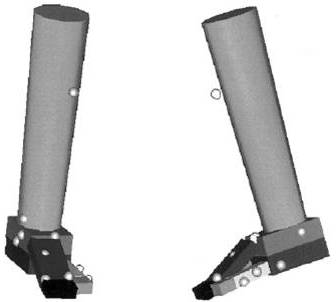
Figura 8. Configuración de los 7 segmentos del modelo pierna-pie presentados en los planos frontal y sagital. Arampatzis et al, 2002
Un total de 18 marcadores reflectivos fueron colocados en el complejo pierna-pie. 8 de ellos obedecen a protocolos establecidos sobre los sistemas óseos y los demás en partes donde la piel o los tendones tienen menos movilidad. (ver figura 9)
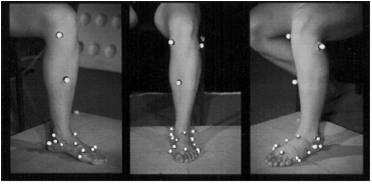
Figura 9. Distribución y Localización de los 18 marcadores del modelo pierna-pie según Arampatzis et al, 2002
Finalmente, el modelo Antropodo-ii&sb presentado por Acero J. (2010) del Instituto de Investigaciones y Soluciones Biomecánicas, Cali, Colombia, fue diseñado para desarrollar e implementar un sistema computarizado con metodología biomecánica sencilla, práctica y valida con los fines de medir, interpretar y analizar lo referente a la geometría fundamental 2D del pie, (Postura del pie) basado en el estado del arte de medidas fundamentales y complementarias y en nuevas propuestas tecno-científicas.
El sistema lo conforman 4 procedimientos básicos (a) Marcaje 2D y 3D de los 28 puntos de referencia anatómicos del pie (b) registro biomecánico digital por imágenes del pie marcado y de las escalas espaciales 2D de medición bajo 4 planos de movimiento (Ver figura 10) (c) edición y digitalización 2D de las imágenes y de la variables geométricas 2D de cada pie. (Software de medición PD-IMAGEJ) y (d) traspaso de datos al software (ANTROPODO-II&SB v.1) de interpretación y análisis de resultados. Un total de 56 mediciones antropométricas 2D (ver figura 10) en cuatro planos de movimiento de cada pie son consideradas desde la literatura revisada y desde la experiencia investigativa de este autor
Este modelo del pie tiene una gran utilidad en la caracterización postural y geométrica 2D aplicado en el deporte, el ejercicio, en la rehabilitación, en la ergonomía y en el diseño y construcción de calzado
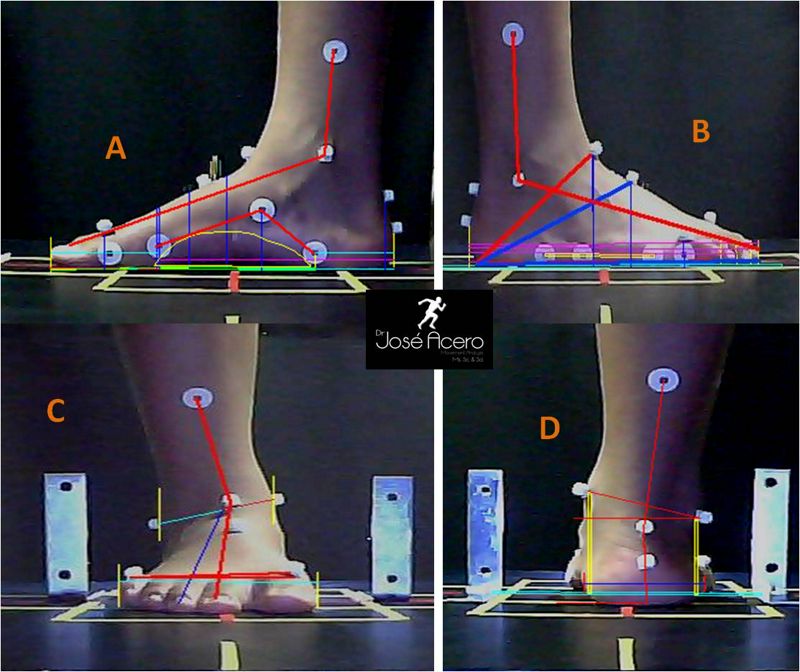
Figura 10. Configuración de los Planos (A: plano sagital medial, B : Plano sagital Lateral C : Plano frontal anterior D : Plano Frontal Posterior) segmentos, marcadores anatómicos y variables de medición 2D en el sistema Antropodo-ii&sb. Acero J. (2010)
Referencias Bibliográficas
Acero J. (2010) ANTROPODO II&SB: Medición e interpretación de la geometría 2D del pie Progreso 1. Memorias 1er Congreso Iberoamericano de biomecánica deportiva. Ministerio Popular del deporte e Instituto Nacional del Deporte de la República Bolivariana de Venezuela. 24 al 27 de Agosto. Mérida Venezuela
Arampatzis, A., Bruggemann, G., Klapsing, G.M., 2002. A three-dimensional shank-foot model to determine the foot motion during landings. Medicine and Science in Sports and Exercise 34(1),130–138
Bishop C, et al.: The development of a multi-segment kinematic model of footwear. Journal of Foot and Ankle Research2012,5(Suppl. 1):O43
Carson, M. C., Harrington, M. E., Thompson, N., et al.: Kinematic analysis of a multi-segment foot model for research and clinical applications: a repeatability analysis. J. Biomech.34, 1299–1307 (2001)
Cheung, M., Zhang, J.T.M.: Finite element modeling of human foot and footwear, Proceedings of 19th Annual International ABAQUS Users’ Conference, Boston, USA, 2006, 145–159.
J. Simon, H. G. Bock, D. Metaxiotis, A. Siebel, L. Döderlein: A Multi-Segmented Foot Model, Gait & Posture, 13, pp. 269-270 (2006).
S. M. Kidder, F. S. Abuzzahab, Jr., G. F. Harris, andJ. E. Johnson, "A system for the analysis of foot and ankle kinematics during gait," IEEE Transactions onRehabilitation Engineering, vol. 4, pp. 25-32, Mar 1996.
![]()